











Código QR

Sobre nosotros
Productos
Contáctenos

Teléfono

Correo electrónico

DIRECCIÓN
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China











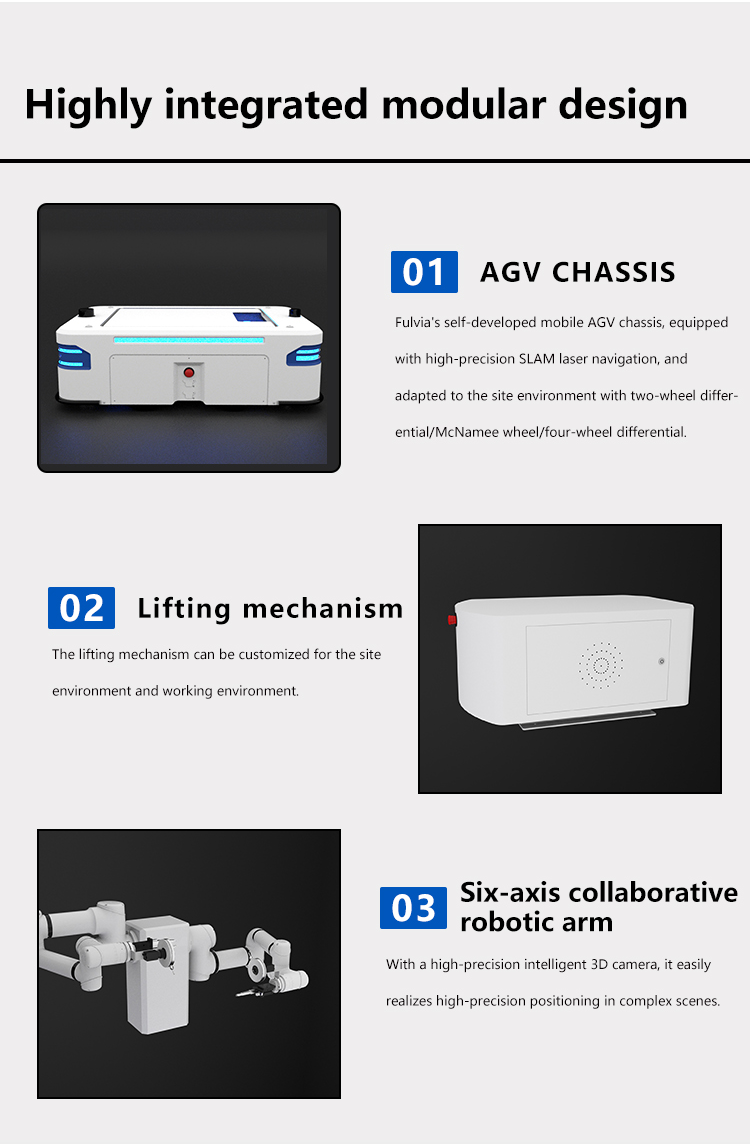
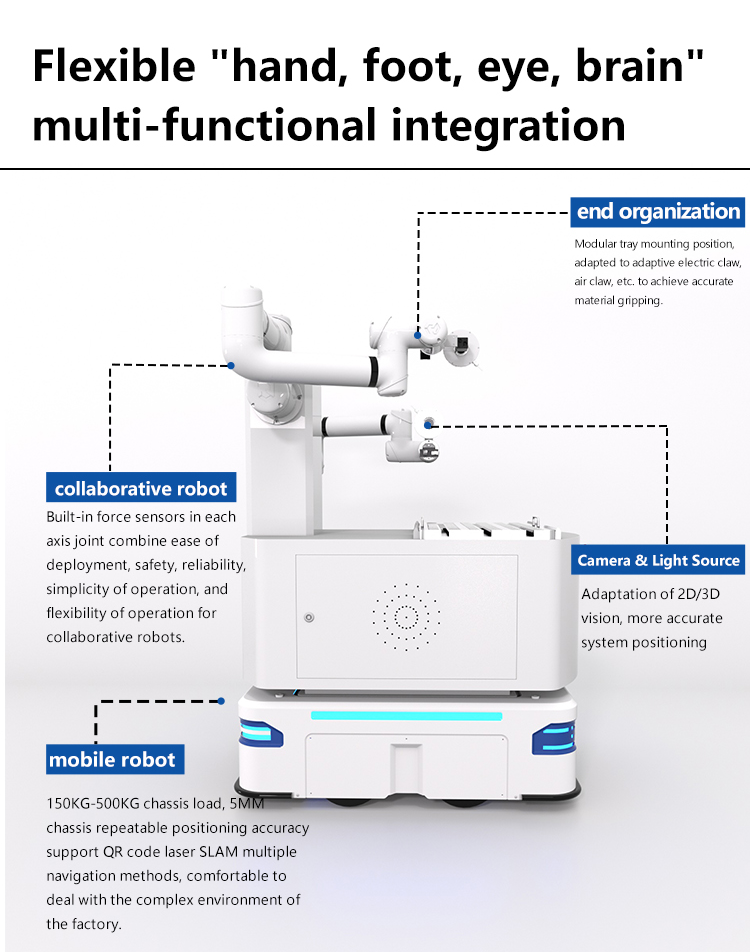
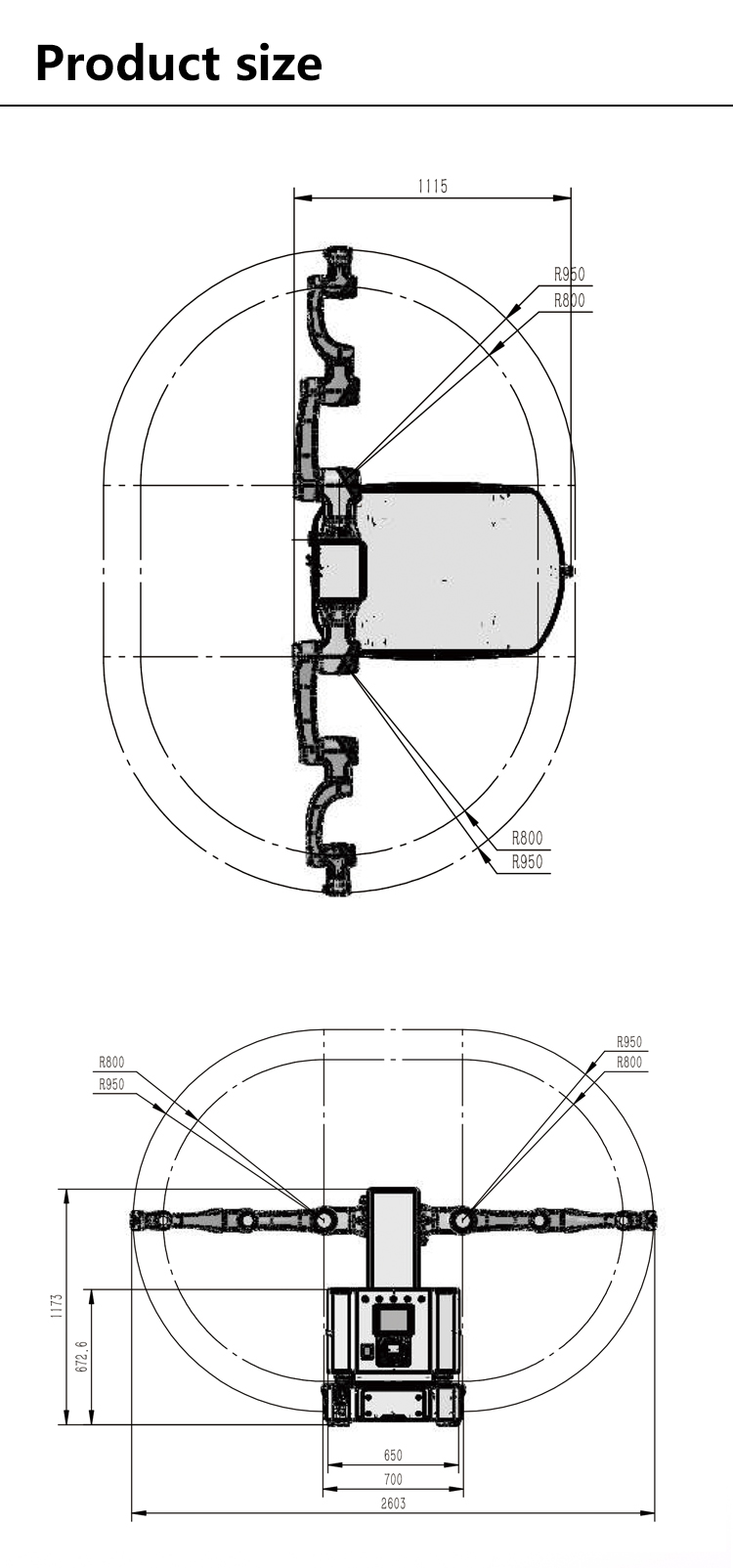
Robot compuesto de brazo dual 50012-GV-DA Características de rendimiento:
Diseño modular altamente integrado;
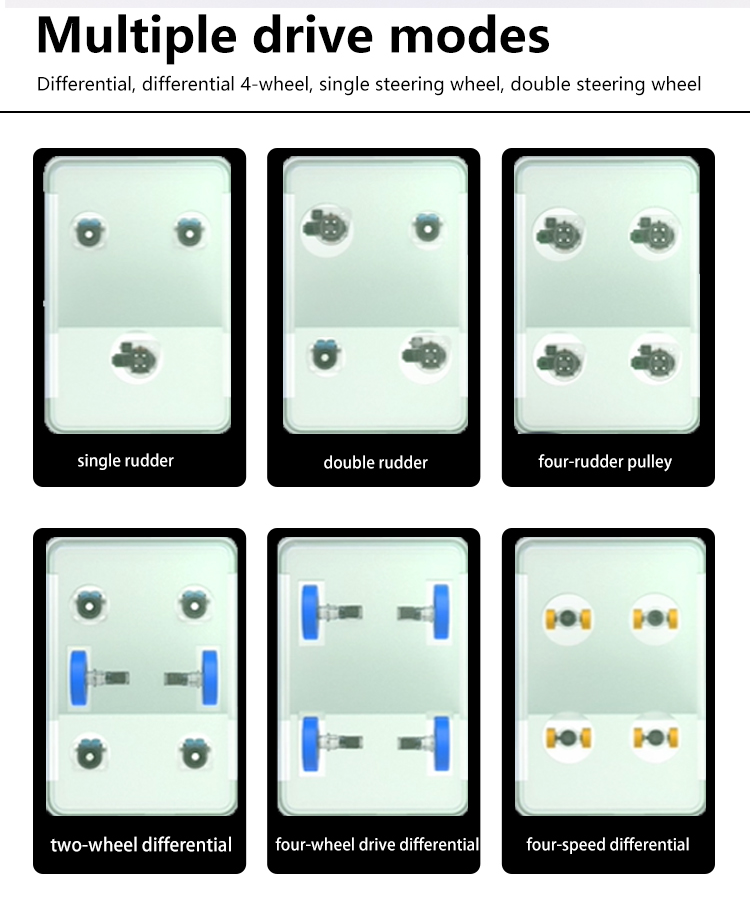
Métodos de conducción múltiples: diferencial, diferencial de 4 ruedas, volante único, volante doble;
Funciones desarrolladas de forma independiente de las órdenes de autostop de aceptación previa y las órdenes de combinación;
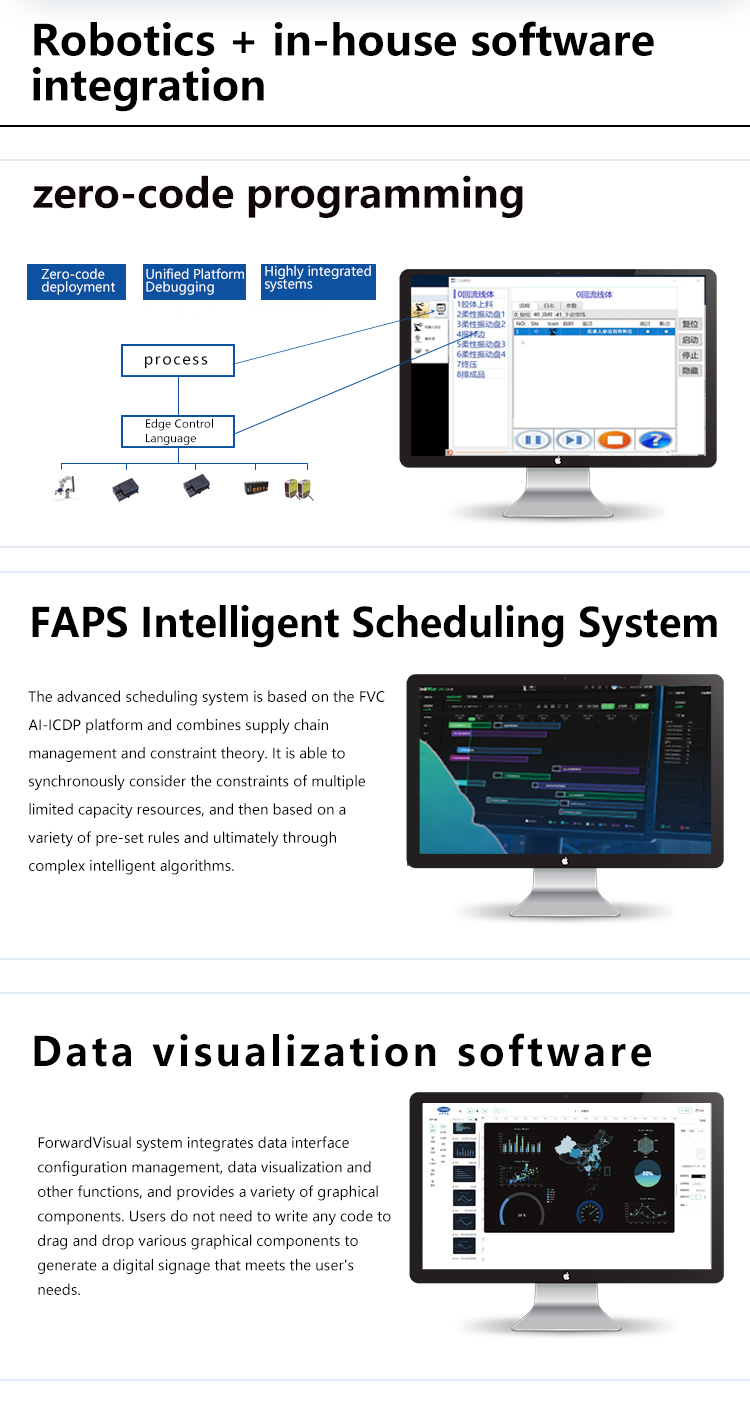
Integración de robots y software autodesarrollado: programación de código cero, sistema de programación de producción inteligente FAPS



Parámetros de especificación:
| Producto modelo |
ICR50012-GV-DA |
| Nombre |
Robot compuesto de doble brazo |
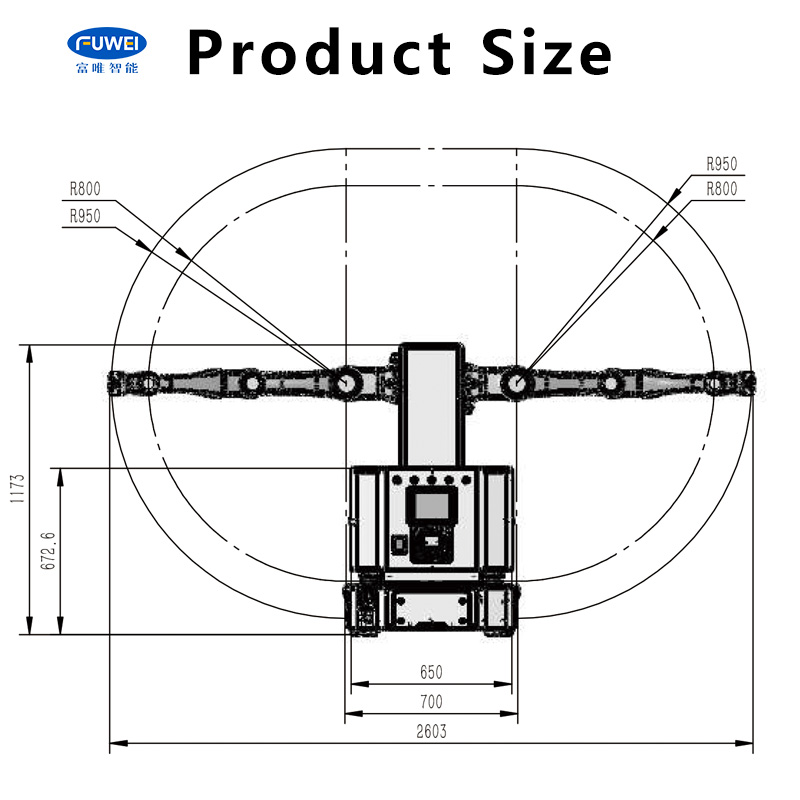
| Tamaño del chasis AGV |
1000 mm*700 mm*200 mm |
| Velocidad de navegación del robot móvil |
<1.0m / s |
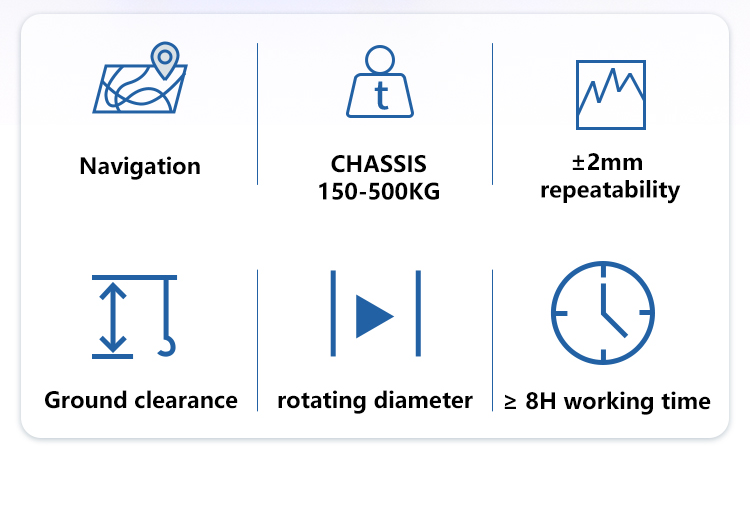
| Peso de robot compuesto |
310 kg |
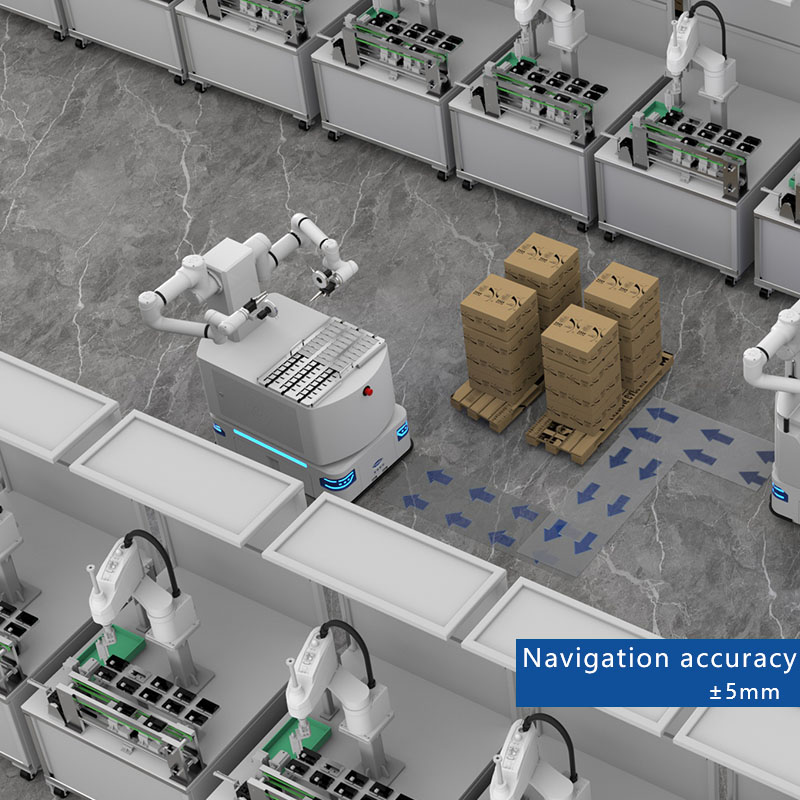
| Precisión de navegación de robots móviles |
5 mm |
| Precisión de posicionamiento repetitivo de robots colaborativos |
0.02 mm- ± 0.05 mm |
| La mayor precisión operativa de robots compuestos |
Imm (con visión 3D)/± 0.05 mm (con visión 2D) |
| software |
Control hacia adelante |
| Método de navegación |
Láser golpe |
| Método de conducción |
Diferencial de dos ruedas |
| Capacidad de escalada |
20 |
| Capacidad de batería |
48V/52AH (litio ternario) |
| Tiempo de carga (10-80%) |
5.5h |
| Función de evitación de obstáculos 3D |
<2.5h |
| Función automática de despertar del sueño |
Configuración estándar |
| Pantalla de visualización de HLM |
Configuración estándar |
| Función de carga automática |
Configuración estándar |
| Visión 3D del efector final de un brazo robótico |
Configuración estándar |
| Visión 2D del efector final de un brazo robótico |
Selección opcional |


DIRECCIÓN
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China
Teléfono
Correo electrónico
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China
