











Código QR

Sobre nosotros
Productos
Contáctenos

Teléfono

Correo electrónico

DIRECCIÓN
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China

1 、 Descripción general del proyecto
Este plan tiene como objetivo personalizar un sistema de plataforma de práctica educativa de robots para satisfacer las necesidades de enseñanza de un laboratorio universitario en visión artificial y control de fuerza. El sistema se desarrollará alrededor del robot colaborativo Aubo-I5, la cámara industrial HikVision, la cámara 3D y el sensor de fuerza de seis eje para lograr funciones como el control del robot, la inspección visual y el ensamblaje de control de fuerza, y proporcionar un software de computadora superior de código abierto para una expansión funcional posterior.

2 、 Composición de hardware del sistema
Robot: Adoptando el robot colaborativo Aubo-I5, tiene las características de alta precisión y alta seguridad, y es adecuada para escenarios de enseñanza.
Cámara: incluida la cámara industrial HikVision y la cámara 3D, utilizada para obtener información de imágenes de piezas de trabajo, admitiendo el procesamiento tradicional de imágenes y la detección de imágenes de aprendizaje profundo.
Sensor de fuerza de seis dimensiones: Kunwei (KWR75) u otras marcas se seleccionan para el monitoreo en tiempo real de la información de interacción de fuerza entre el efector del robot final y la pieza de trabajo.
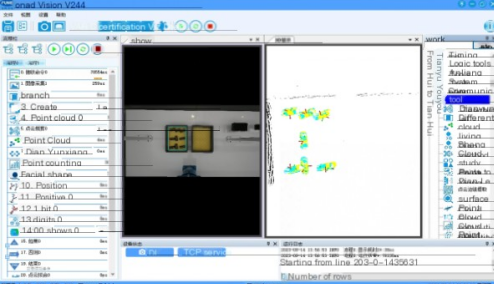
3 、 Diseño de software de computadora superior
Funciones básicas:
Control del robot: implementar funciones como conexión, desconexión, control de la articulación o postura de robots.
Control de la cámara: implementar funciones como conexión de cámara, desconexión y adquisición de imágenes.
Pantalla de estado: visualización en tiempo real de la junta del robot y el estado de pose, los parámetros de estado del sensor de fuerza de seis eje e imágenes capturadas por la cámara.
Características exclusivas:
Conjunto del orificio del eje: a través de la operación de la computadora superior, combinada con la tecnología de inspección visual y control de fuerza, se logra la función de ensamblaje automático del orificio del eje.
Diseño de interfaz: la interfaz de la computadora superior debe ser concisa, clara y fácil de operar. La interfaz debe incluir botones de función básicos y un área de visualización de estado, así como proporcionar acceso a la función de ensamblaje del orificio del eje.
4 、 Implementación de funciones
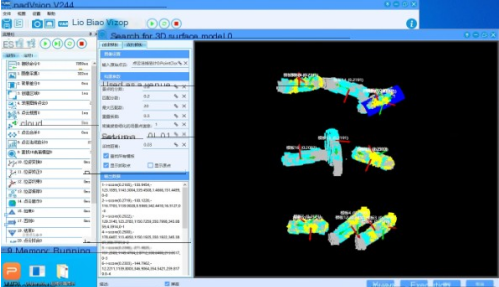
Visión artificial:
Detección tradicional de imágenes: utilizando la coincidencia de plantillas, el ajuste del círculo, el ajuste de borde y otros métodos para localizar y reconocer piezas de trabajo, respaldando el reconocimiento de códigos de barras, códigos QR, números de caracteres, así como el cálculo de la cantidad de área de escala de grises y la cantidad de placas.
Detección de imágenes de aprendizaje profundo: reconocimiento automático y localización de piezas de trabajo a través de algoritmos de aprendizaje profundo. Aunque el aprendizaje profundo todavía requiere una anotación manual de imágenes, nos esforzaremos por mejorar la eficiencia de la capacitación y la precisión del reconocimiento, reduciendo gradualmente la carga de trabajo de la anotación.
Conjunto de control de potencia:
Combinando datos de sensores de fuerza de seis dimensiones, alcanzar el control de interacción de fuerza entre el efector del extremo del robot y la pieza de trabajo, y el ensamblaje preciso completo del orificio del eje.
5 、 Riesgos y medidas de respuesta del proyecto
Riesgo de cooperación con sensores de fuerza de seis eje: debido a la falta de cooperación con los sensores de fuerza de seis eje, puede haber ciertas dificultades y incertidumbres técnicas. Organizaremos un equipo técnico profesional para abordar el problema y garantizaremos la integración sin problemas y el funcionamiento estable de los sensores.
Riesgo de detección de imágenes de aprendizaje profundo: la detección de imágenes de aprendizaje profundo requiere un cierto nivel de precisión y eficiencia de reconocimiento, al tiempo que cumple con el requisito de capacitación de un clic. Continuaremos optimizando los algoritmos de aprendizaje profundo para mejorar la precisión y la eficiencia del reconocimiento, al tiempo que exploran formas de implementar la capacitación de un clic.
6 、 Post expansión y cambio de escena
El software de la computadora superior adopta el diseño de código abierto, que facilita la expansión funcional y el cambio de escena según sea necesario en la enseñanza posterior. Por ejemplo, la escena de ensamblaje de los agujeros del eje se puede cambiar a tareas como la malla de engranajes finos o el reconocimiento y el agarre de otras piezas de trabajo. Al modificar y depurar programas de código abierto, es fácil lograr las funciones de operación de robots y detección visual en diferentes escenarios.
Este plan integra recursos de hardware, como robots, cámaras y sensores de fuerza de seis eje, combinados con el diseño de software de computadora superior de código abierto, para proporcionar un entorno de enseñanza rico y fácilmente expandible para la plataforma de práctica educativa de robots. Mediante el uso de plataformas prácticas, los estudiantes pueden obtener una comprensión más profunda de los principios y aplicaciones de la tecnología de control de la visión y la fuerza de la máquina, y mejorar sus habilidades prácticas e innovadoras.
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China
