











Código QR

Sobre nosotros
Productos
Contáctenos

Teléfono

Correo electrónico

DIRECCIÓN
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China

Descripción general del proyecto
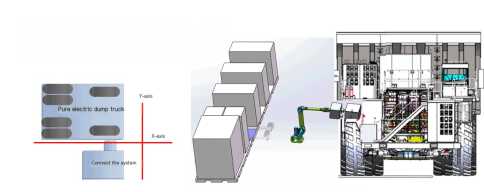
Este proyecto tiene como objetivo diseñar un sistema de carga automática de camiones volquete eficiente y estable para satisfacer las necesidades de carga de los clientes en condiciones de producción interior en la región de Shanxi. El sistema necesita lograr la operación y el control no tripulados de los vehículos de ingeniería, solo completando las funciones de manejo y carga automática de los puntos A y B para cumplir con los requisitos de operación continua de la línea de producción.
composición del sistema
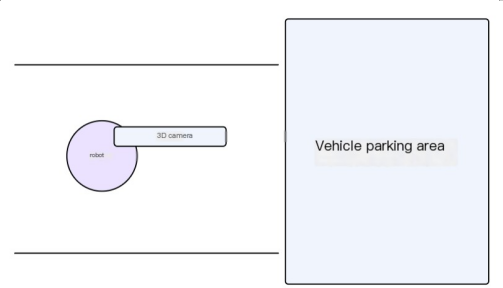
Sistema de posicionamiento visual: utilizando cámaras de alta precisión y algoritmos visuales para lograr un posicionamiento preciso del puerto de carga en camiones volquete. El sistema visual debe tener la capacidad de resistir el polvo y la luz solar directa, asegurando un funcionamiento estable en varios entornos interiores.
Robots y mecanismos de empuje de pistola: se seleccionan robots industriales con unas de brazo de 3 m o más, equipados con mecanismos de empuje de armas especialmente diseñados. El mecanismo de empuje de armas debe tener suficientes empujes y precisión para garantizar que la pistola de carga pueda ser insertada de manera precisa y rápida en el puerto de carga.
Sistema de carga: equipado con equipo de carga de alta potencia de 3 megavatios, asegurando que el camión volquete se pueda cargar por completo en un corto período de tiempo y mejorar la eficiencia de producción.
Sistema de control: a través de un sistema de control integrado, se puede lograr un control preciso del posicionamiento visual, el movimiento del robot y el proceso de carga. El sistema de control debe tener altas características de automatización e inteligencia, y poder lograr una carga automática no tripulada.
Flujo de trabajo
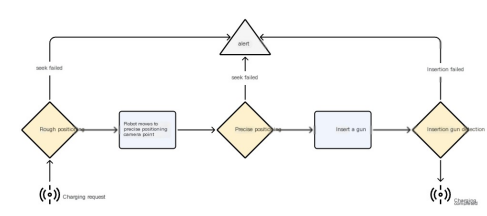
Posicionamiento de la camión de autocamparte: identifique y localice la posición del puerto de carga del camión volquete a través de un sistema de posicionamiento visual.
Robot Motion: el sistema de control guía al robot a moverse cerca del puerto de carga del camión volquete en función de los resultados de posicionamiento visual.
Presionando la inserción de la pistola: el robot está equipado con un mecanismo de pistola de empuje, que inserta con precisión y rápidamente la pistola de carga en el puerto de carga del camión volquete.
Proceso de carga: el sistema de carga comienza a cargar el camión volquete hasta que alcanza el nivel o el tiempo de potencia preestablecida.
Evacuación del robot: después de completar la carga, el robot evacuará el puerto de carga y esperará la llegada del próximo camión volquete.
tecnología clave
Tecnología de posicionamiento visual: mediante el uso de algoritmos como el aprendizaje profundo, se puede mejorar la precisión y estabilidad de los sistemas de posicionamiento visual.
Tecnología de control de robots: optimizar la trayectoria y la velocidad de movimiento del robot para mejorar la eficiencia de carga.
Diseño del mecanismo de empuje de armas: asegúrese de que el mecanismo de empuje de armas tenga suficientes empujes y precisión, al tiempo que considera su compacidad y confiabilidad estructurales.
Respuesta de riesgo
Protección ambiental interior: garantice un ambiente interior limpio y seco, reduzca el impacto del polvo y la luz solar directa en el sistema de posicionamiento visual.
Mantenimiento de hardware: mantenga y mantenga regularmente hardware como robots y sistemas de posicionamiento visual para garantizar su funcionamiento normal.
Evaluación profesional: invite a los profesionales a evaluar y optimizar el mecanismo de empuje de armas, el sistema de carga, etc., para garantizar la seguridad y la viabilidad de la solución.
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China
