











Código QR

Sobre nosotros
Productos
Contáctenos

Teléfono

Correo electrónico

DIRECCIÓN
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China

Como un dispositivo altamente integrado e inteligente, los robots compuestos también tienen amplias perspectivas de aplicación en el campo de la producción de acero magnético. En la actualidad, muchas empresas de producción de acero magnético todavía usan métodos tradicionales de carga y descarga manuales, que no solo son ineficientes sino también susceptibles a los factores humanos, lo que lleva a una calidad inestable del producto. Al mismo tiempo, con la intensificación de la competencia del mercado, las empresas tienen requisitos cada vez más altos para la eficiencia y calidad de la producción, y los métodos de producción tradicionales ya no pueden satisfacer la demanda del mercado. El cliente es una industria de fabricación inteligente y espera transformar los robots antiguos en robots compuestos a través de la inteligencia de Fuwei para la carga y descarga de acero magnético.
Puntos dolorosos de la carga y descarga tradicional de acero magnético:
1 Alta dependencia de la operación manual: los procesos de corte tradicionales a menudo dependen en gran medida de las operaciones manuales, incluido el manejo, el posicionamiento y la colocación del acero magnético. Esto no solo aumenta los costos laborales, sino que también es susceptible a los factores humanos, lo que lleva a una precisión y eficiencia operativa inestables.
2 Problemas de seguridad operativa: el acero magnético tiene un magnetismo fuerte, y si se opera accidentalmente manualmente, puede causar accidentes de seguridad como el agarre de las manos y el impacto, lo que representa una amenaza para la seguridad de los operadores.
3 Baja eficiencia de producción: debido a la dependencia de la operación manual, la velocidad y la eficiencia de la carga y la descarga son limitadas, lo que dificulta satisfacer las necesidades de producción a gran escala y alta eficiencia.
4. Control de calidad inestable: la operación manual puede conducir a un posicionamiento inexacto y una colocación desigual del acero magnético, lo que afecta la calidad del procesamiento o ensamblaje posterior.
5. Problemas del entorno laboral: durante el proceso de carga y descarga del acero magnético, se puede generar contaminación ambiental como el polvo y el ruido, lo que puede tener un cierto impacto en el entorno laboral y la salud de los operadores
Requisitos del cliente:
Los robots compuestos completan la carga y descarga de dos tipos de productos
Requisito de ritmo: complete la carga de dos pilas de productos en aproximadamente 80 segundos
Precisión: como se muestra en la figura (con orientación)
Tamaño del producto310 * 210 * 10 (excluyendo acero magnético)
Plan de renovación1 robot compuesto
Reemplace el motor:
Seleccione motores de alto rendimiento que coincidan con la estructura del robot para garantizar que el par de salida y la velocidad cumplan con los requisitos para agarrar y mover el acero magnético.
El motor debe tener una alta confiabilidad y durabilidad para adaptarse a entornos de trabajo de alta intensidad a largo plazo.
Reemplace el servo controlador:
Seleccione servo controladores con algoritmos de control de alta precisión para lograr un control preciso del movimiento del motor.
El servo controlador debe tener una respuesta rápida y un rendimiento estable para garantizar la precisión y estabilidad del robot al realizar acciones complejas.
Navegación de radar:
Equipado con sensores de radar de alta precisión para lograr la navegación autónoma y el posicionamiento de los robots.
Al escanear el entorno circundante con radar, se construye un mapa ambiental para lograr funciones de planificación de ruta y evitación de obstáculos.
Cinturón de luz:
Instale tiras de luz LED en partes clave del robot para mejorar su visibilidad y reconocimiento.
La tira de luz debe tener suficiente brillo y uniformidad para garantizar la iluminación efectiva del entorno de trabajo en diferentes condiciones de iluminación.
Vocero:
Instale una bocina de alarma para sonar una alarma en situaciones de emergencia.
Mientras tanto, los altavoces se pueden usar para indicaciones de voz, facilitando la interacción entre operadores y robots.
Pinza (con cámara y otros sensores):
Diseñe las pinzas especializadas personalizadas para garantizar el agarre estable y preciso de acero magnético.
Integrando las cámaras de alta definición y la detección de fuerza, táctil y otros sensores en la pinza para lograr un reconocimiento preciso del acero magnético y el control de la fuerza de agarre.
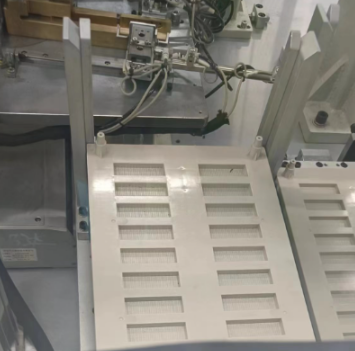
2 、 Área de carga
Guía de posición Guía:
Ranuras de guía de posicionamiento de diseño para guiar el acero magnético en posiciones designadas, facilitando el agarre de los robots.
El surco de la guía debe tener suficiente precisión y estabilidad para garantizar que el acero magnético pueda colocarse con precisión en la posición preestablecida.
Marca de posicionamiento de escritorio:
Establezca las marcas de posicionamiento claras en el escritorio del área de carga para el reconocimiento de robots y el posicionamiento de puntos de agarre.
La marca de la marca debe tener características claras y fácilmente reconocibles para garantizar que el robot pueda reconocerlo con precisión en diferentes condiciones de iluminación.
3 、 Área de descarga de material
Marca de posicionamiento del equipo:
Configure los marcadores de marcas de posicionamiento en el equipo en el área de descarga para el reconocimiento de robots y el posicionamiento de los puntos de colocación.
El diseño de la marca de la marca debe tener en cuenta la estructura y el tamaño del equipo para garantizar que el robot pueda colocar con precisión el acero magnético en la posición designada.
Puerta del panel de control eléctrico:
Instale las puertas del panel de control eléctrico en el área de descarga para proteger a los robots y operadores de lesiones accidentales.
La puerta del panel de protección debe tener una respuesta rápida y funciones automáticas de cierre para garantizar que pueda cerrar automáticamente cuando el robot está funcionando, evitando que el personal ingrese al área peligrosa.
Ranura de pulsador de control eléctrico:
Diseñe una ranura deslizante controlada eléctricamente para empujar equipos o bandejas con acero magnético fuera del área de descarga.
La ranura deslizante debe tener un rendimiento de movimiento suave y confiable para garantizar que el acero o el equipo magnético no se dañen durante el proceso de empuje.
A través del plan de transformación anterior, el robot compuesto podrá lograr la carga y descarga automática del acero magnético, mejorando la eficiencia de producción y la estabilidad de la calidad. Mientras tanto, al optimizar la configuración de diseño y equipo de las áreas de carga y descarga, el robot puede garantizar la finalización precisa y eficiente de las tareas.
No. 22, Hongyuan Road, Guangzhou, provincia de Guangdong, China
